ROS를 사용하기위해 필요한 catkin workspace를 구성하는 단계이다.
catkin 이외에도 ROS내에서 사용가능한 workspace형태가 있다고 알고있지만 사용해본적이 없고 또 catkin이 가장 대중적인 방법이기도 하기에 catkin을 소개하겠다.
우선 catkin이란 공통된 source를 가지는 ROS 패키지들을 하나로 묶아 관리하는 workspace로 알고 있으며 ROS에서 제공하는 다양한 툴을 이용해 쉽게 환경을 구축할 수 있다.
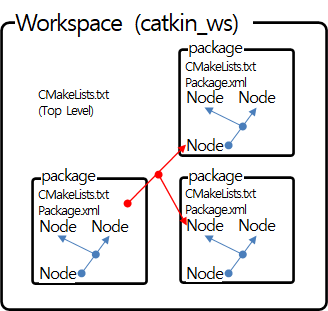
catkin workspace의 구성을 간단하게 표현하자면 오른쪽과 같은것이다.
사실 잘 표현한 것인지는 모르겠지만 대충 workspace내에 package가 존재하며 패키지 내 노드들이 각자 작동하며 message의 형태로 통신한다 라는 식으로 생각하면 될듯하다.
기본적으로 catkin workspace는 ~/catkin_ws에 구축되며 이에 최초로 환경을 만드는 과정은 다음과 같다.
단 이는 이전 6번의 과정에서는 받은 git 경로 내에 이미 진행이 되어있는 부분이다.
mkdir -p ~/catkin_ws/src
cd ~/catkin_ws
catkin_make
순서대로 각각 mkdir를 통해 경로를 만들어 주고 catkin_ws로 진입해 환경을 만들어 주는 코드이다.
catkin_make 자체는 초기 설정 뿐 아니라 이후 작업시 package내 변경사항을 수정할때에도 사용이 된다. 만약 이전글인 1번글에서 단축 커멘드를 설정했다면 cm 만으로도 위 코드가 실행된다.
이후 패키지 경로를 추가해 주면 끝나게 된다.
source devel/setup.bash
원래 package 생성에 대해서도 다루려했지만
이전에 올렸던 글들을 보니 하나하나 너무 길어지는 것 같아 좀 짧게 마무리 하고 다음 글에 나눠 적도록 하겠다.
'Jetson > Jetson ROS' 카테고리의 다른 글
| [Jetson ROS] 5-2. ROS에서 Basler 카메라 사용하기 (2) (0) | 2021.01.03 |
|---|---|
| [Jetson ROS] 5-1. ROS에서 Basler 카메라 사용하기 (1) (0) | 2021.01.03 |
| [Jetson ROS] 4. ROS에서 python3 사용하기 (0) | 2021.01.03 |
| [Jetson ROS] 3. ROS package (0) | 2020.12.23 |
| [Jetson ROS] 1. ROS 설치 및 초기 설정 (0) | 2020.12.19 |


